People are excited about extended reality. They dream of having a Metaverse where they would spend their time and earn money. And one of the key aspects of the Metaverse is the virtual world itself. It may be designed by artists, created via procedural 3D modeling, or taken from the real world via scanning. The broader availability of consumer 3D scanning makes it one of the most promising ways for the massive generation of the Metaverse.
How a 3D model is created
3D mapping creates a 3D model of physical objects. It can be achieved in various ways, for example, by using a professional lidar scanner. Or you can do that with the lidar of the new iPhone. Alternatively, one may use the SfM (Structure from Motion) approach, where a stack of photos of the same space or object is fed to an algorithm that solves the optimization problem where camera positions and 3D point locations are the optimized variables. That process outputs a point cloud that transforms into a 3D model after densification and meshing.
The models differ in their precision, level of detail, and presence of textures. Those depend on the quality and quantity of input images, the algorithms involved, and the computational effort spent. Recently, a number of apps have been introduced offering 3D scanning of fair quality for consumer smartphones. It is much more convenient than using professional equipment, which is typically a way to generate a 3D scan.
The quality gaps between apps reflect a structural constraint: all automated reconstruction methods produce dense, unoptimized geometry that needs cleanup before it is usable in a game engine, product renderer, or manufacturing workflow. Our article AI 3D Generation: From Prototype to Production covers that post-processing pipeline for AI-generated 3D geometry. The same logic applies to everything compared here.
What were we evaluating in the reviews?
As a computer vision company, It-Jim is fascinated by the new possibilities which appear along with the lidars for consumer devices. We’ve tested several 3D lidar-based scanning applications for iPhones and want to share the results. Our list of 3D apps to examine included Scandy Pro 3D scanner, Qlone 3D scanner, Cubicasa, Matterport Capture, Magicplan, 3D Scanner App, Polycam, Mapstar, and Scaniverse. Our primary interest was the quality and speed of reconstruction. We’ve also checked the usability of the apps as well as additional features like large object and small object scanning modes, export, ease of registration, and cost. The table below summarizes our high-level marks (10-point scale, where applicable).
| Features | UX | Large object mode | Small object mode | Export | Registration | Price | Social network in the app | |
| Scandy Pro 3D scanner | 3 | 8 | – | + | 5 | – | $ 150 or signup | – |
| Qlone 3D scanner | 2 | 3 | – | + | – | + | free or $ 15 | – |
| Cubicasa | 5 | 5 | + | – | $ | complicated | $ 10 per model | – |
| Matterport Capture | 4 | 7 | + | – | + | – | free | – |
| Mapstar | 5 | 3 | + | – | – | complicated | free | + |
| Magicplan | 9 | 9 | +/- | – | + | – | free or $ 10 | – |
| 3D Scanner App | 8 | 8 | + | + | 10++ | – | free | – |
| Scaniverse | 10 | 10 | + | + | 7 | – | free | – |
| Polycam | 10+ | 10+ | + | + | 10++ | + | free | + |
The technology is not yet perfect, so each app has its drawbacks and limitations. Let’s cover them in detail.
Scandy Pro 3D scanner
7-day free trial. Features: 3/10. UI/UX: 8/10
Scandy Pro 3D scanner is an application whose main function is the 3D reconstruction of spaces. And, broadly speaking, it does the job. How well and is it convenient enough? The question remains open.
It’s important to note that we were only able to run the app with a selfie camera and TrueDepth sensor (that is, without the main camera and lidar). At the time of writing this review, some changes have been made to the app.
What’s not right?
The nuisance that immediately catches your attention is the vibration you get for “incorrect scanning.” However, the app doesn’t provide any explanation on how to do the scan right. In addition, the app behaves strangely before you press the “scan” button. Also worth noting is the loss of camera position tracking even in relatively simple cases.
About models
Even if you manage to scan a surface, the app is likely to lose about 70% of it. In the preview, the grid shows more than in the final version. The resulting model can be edited, saved, and sent – no other options for working with it are available.
An odd feature
As for the face scanning, it was, again, not without “surprises.” For a successful scan, the user must turn his head smoothly and slowly in front of the camera. Partial visual control of the process greatly complicates the task.
Any pros to the app?
Yes, there are some, too. We can note a fairly fast display of the scanned surface and the ability to export to 5 file formats. But of course, this doesn’t positively affect the user experience in the application.






Qlone 3D scanner
Free/$15. Features: 2/10. UI/UX: 3/10.
In general, the app has some apparent limitations and a rather poor scanning, although it has some good sides to it, too.
To begin with, mappable objects are small and limited. Which is to say, this scanner is not suitable, for example, for the reconstruction of spaces.
The user must print the background mat. Moreover, the size of the object for 3D must be comparable to the size of the printout. At least the user can print the background from the application directly.
About the scanning process
As for the scanning itself, it is quite disappointing. The free version works with a helping marker. The user should print this marker and place the object on that. The user must cover all sectors augmented around the marker. The scanning process requires patience and effort.
The only thing we can highlight as a plus is fair scanning interactivity.




Cubicasa
Free/$15. Features: 5/10. UI/UX: 5/10.
In this case, we had to place an order (starting at $9.99) to get the scan results and thus be able to write an app review in full. We didn’t do that since there are plenty of free options.
Getting Started challenges
To get started with the app, you need to register. The registration process is lengthy as it requires a lot of information: about the company, the type of user, etc. When using the application, the unreasonably large buttons in the menu strike the eye, which is not necessarily a downside but rather a UI flaw.
App functionality:
The developers claim that there’s a 3D room reconstruction among the app’s functions. Scanning is available, and an augmented mesh is also shown. Each scan requires typing in some information. That is not user-friendly. The album mode for capturing is not comfortable.
In-app Tutorials
The scanning tutorial is supposed to simplify the process, but to find the answer, you must go through multiple pages. Still, the warnings and tips for scanning are reasonably well-designed and helpful.
To sum up, the app has some pretty nice features, but it can hardly be called entirely user-friendly.



Matterport Capture
Free. Features: 4/10. UI/UX: 7/10.
One example of a fair-quality and easy-to-use application, which, of course, is not without its limitations.
The main features
The menu and functionality are made simple and accessible to a wide range of users. It is important to note a good tutorial of the application.
When scanning, you have to point the camera at some AR markers added to the frame. This could be a good helping feature. The app can generate a 360-degree panorama. In addition, a room plan with a view from the top is available.
Some difficulties in the use
Scanning is limited to panorama mode – the user has to rotate the phone while holding the camera in the same place (which is not that easy).
We could not extract any 3D objects while using the app.






Mapstar
Features: 5/10. UI/UX: 3/10
The dream of the authors of the Mapstar app is to create a meta-universe using scanning, geolocation, and NFTs. The app contains a specific “social” network with other users’ creations. Among the main features, 3D reconstruction tools are available both with and without lidar. In addition, there are some additional features whose usability might be questionable.
App Functions and difficulties in using them
The application cannot be used without registration. But the actual problem is that the registration process itself has a lot of bugs, which creates difficulties right from the start.
The lidar scan is hard to call high-quality. A feature which makes Mapstar app different from the others in a good way is that it is able to make scans without lidar which works quite well considering the limitations of non-lidar data. One of the features of the models is the ability to add 3D effects and links from YouTube.
Some objects are not scanned, such as a single-color ceiling. In addition, the preview picture often looks nice, but as a result, we get a model with many flaws and discrepancies.
Unfortunate visual solutions
As for the visual aspect of the application, there are things that could be improved here as well. Visually, it looks raw. The design, UI, and UX have many shortcomings that make the app difficult to use and not particularly attractive. It’s also inconvenient to view added photos and videos because of the unfortunate design solution.
The preview grid creates visual clutter during scanning, which does not add to usability. In addition, the mesh takes quite a long time to initialize.
There are other oddities of the app as well. For example, the main screen displays a reconstruction made by some random user. It’s not quite clear why this solution was implemented.





Magicplan
Free/$9.99. Features: 9/10. UI/UX: 9/10.
The main purpose of the application is to create floor plans, which are drawn using a user interface. The application can even be used for large-scale projects, such as a 50-floor building.
A first look at the app
It’s worth noting that it was designed to create 3D sketches, not 3D reconstructions. The functionality of the app is great for 3D apartment design. Users can also create a 3D sketch without scanning.
What really stands out when you first look at the app, is the well-made user interface. It is visually satisfying, but it also has useful tips and hints. Thanks to the capabilities of the application, you will be able to predict quite accurately what the renovation will look like — paint type and amount, installing of doors and sinks, large choice of furniture with variation. The app demonstrates an excellent implementation of the possibility of creating a room model by points.
What’s in the app?
Scanning is limited to highlighting flat walls and corners and thus measuring room’s shape. The corners of the room are detected automatically. The resulting models can be edited by changing the color, moving the walls, changing the shape, and so on.
You can add objects to the plan and view them in 3D. You can also add items during the scan – windows, doors, outlets, etc. Users get detailed information about each room. The results of the scan can be converted to a model with a low level of detail, and the finished model is stored in the cloud.
To summarize, it’s a pretty good app. It has plenty of practical features and is easy to use.






3D Scanner app
Features: 8/10. UI/UX: 8/10.
A great 3D scanning application that allows you to work with both large spaces and small objects. Fast scanning and a reasonably high-quality 3D reconstruction.
What are the benefits of the app?
First, the navigation is convenient, and the design is not bad. From the perspective of functionality, there are four types of scans available to the user, Point Cloud being the most noteworthy. The scanning itself is done quickly, without much delay. The mesh fills in smoothly with small gaps. It is possible to scan small objects such as a mug.
The 3D reconstruction feature with the TrueDepth sensor is highlighted. This type of reconstruction gives better results than lidar for small objects.
There are other handy solutions in the application. A large number of settings are available – video saving, ruler, etc. For model output, both with and without textures, 13 formats are available. It’s also possible to create zip files.
What are the problems with the app?
Among the disadvantages of the scanner, we can note its sensitivity to mirrors and light from windows. It also doesn’t provide visualization of objects during scanning. The preview of a model looks deficient, but after processing the image, it gets much better. Small voids in the scan are transferred to the final reconstruction without filling in.
Among other drawbacks, sometimes the app crashes, which, however, doesn’t affect the performance very much. The application lacks animated cues, and it’s not always clear how to use certain features correctly.




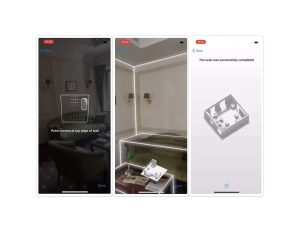
Scaniverse
Features: 10/10. UI/UX: 10/10
Visually pleasant and functional application. Different modes of operation. Great performance without bugs and troubles.
Advantages of the app
Some of the most remarkable benefits: no registration needed to work in the app; a user-friendly, intuitive design with simple and clear functionality; a fast scanning process; unprocessed data can be saved and returned to later.
Highly detailed processing provides excellent reconstructions of even small objects. Models are well-textured and precise, even to the point of being able to read the text on a baseball hat. The scanner handles complex objects such as mirrors, bright windows, open doors, and more.
The output is an excellent model with minimal gaps and minor errors. In addition, the model is easy to edit, fast to convert, offers seven formats to save, and can be sent.
Conclusion
Some nice bonuses include the ability to render a video model. A decent video editing toolkit is also provided.
The application does an excellent job with the stated functions. It is difficult to single out disadvantages that principally affect the work and make it uncomfortable.









Polycam
Features: 10+/10. UI/UX: 10+/10.
An excellent tool for 3D reconstruction. Extensive functionality, high speed, many output formats, and clear tutorials. It has visual guidance, orientation-based coloring preview, and final textured reconstruction. The user can perform simple editing of the model.
What can the app do?
The creation of a model has great interactivity and a number of settings before processing. A preview mode is available, meaning the scanning can pause and then continue. The scanner works great with small objects.
It provides an AR view mode, which is very useful for viewing models. During editing, many model editing and modification functions are available. Subsequent processing can be done in the background. Updating a model takes 2–5 minutes. Textures can be disabled before texturing.
As for how to make full use of the application’s functionality, video tutorials are provided. In addition, the buttons have helpful hints.
Additional Features
The application has photo capture functions for model creation. A model can be created from 20 photos. It’s possible to create a video rendering and save it to the cloud. Finished models can be saved in albums. There are 13 output formats.
As a bonus, there’s an in-app social network where participants can share models.






Finally, you can compare the performance of our top-rated apps in the video below.
Conclusions
The applications we considered were really different from each other. They share the function of 3D reconstruction, but solve that task differently, with different goals and different methods. Some of the reconstructions are really impressive. Giving those applications a try is highly recommended. And we hope our test and comparison could help choose the right application for you.